뉴스·행사
- Home
- 소식
- 뉴스·행사
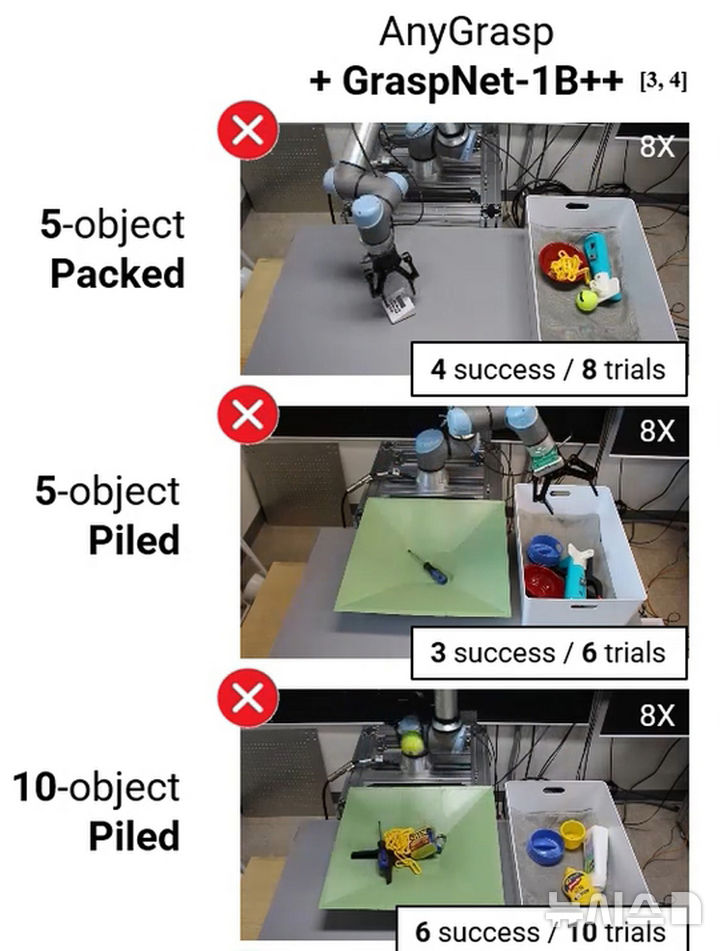
[광주=뉴시스] GIST는 인공지능(AI)융합학과 이규빈 교수 연구팀이 한국기계연구원과의 협력을 통해 실제 생활과 산업 환경의 복잡성을 정밀하게 반영한 로봇 파지(Grasping·물체 집기) 학습용 데이터세트 '그래스프클러터6D(GraspClutter6D'를 구축해 무료로 공개했다. 사진은 로봇집기 시현 장면. (사진=GIST 제공) photo@newsis.com
[광주=뉴시스]이창우 기자 = 광주과학기술원(GIST)은 인공지능(AI)융합학과 이규빈 교수 연구팀이 한국기계연구원과 협력해 실제 생활과 산업 환경의 복잡성을 정밀하게 반영한 로봇 파지(Grasping·물체 집기) 학습용 데이터세트 '그래스프클러터 6차원(GraspClutter 6D)'을 구축해 무료로 공개했다고 9일 밝혔다.
그동안 로봇 인공지능은 실험실이나 산업 현장에서 물체가 잘 정돈된 단순한 환경에서는 높은 정확도로 작동했지만, 실제 가정이나 창고처럼 물체가 뒤엉키고 시야가 가려진 복잡한 상황에서는 성능이 급격히 떨어지는 점이 문제로 지적됐다.
이번 성과는 로봇이 기존의 제한된 실험 환경을 벗어나 실제 현실 속에서도 효과적으로 물체를 인식하고 조작할 수 있는 '피지컬 AI(Physical AI)' 연구에 중대한 전환점을 마련했다는 점에서 주목받고 있다.
현재 대표적으로 널리 사용되는 데이터세트인 '그래스프넷-원빌리언(GraspNet-1Billion)'의 경우 한 장면 당 평균 물체 수가 9개 미만이고, 물체가 가려진 비율도 약 35%에 불과해 실제 환경을 충분히 반영하지 못하는 한계가 있다.
GIST 연구팀은 이러한 한계 극복을 위해 상자·선반·탁자 등 75가지의 다양한 실제 환경을 구성하고, RGB-D(컬러+깊이) 카메라 4대를 활용해 총 1000개의 장면에서 5만2000장에 달하는 고해상도 이미지를 수집했다.
또 실제 물체 200종의 3D 모델, 73만6000개의 6차원 물체 자세 정보, 93억 개에 달하는 로봇의 파지 자세 데이터를 포함시켜 기존 데이터세트와 비교할 수 없는 규모와 현실성을 갖춘 초대형 학습 리소스를 마련했다.
6차원 자세 정보는 로봇이 물체를 어떤 위치에서 어떤 방향으로 집을지 결정하는 데 핵심적인 요소다. 단순한 위치 좌표만이 아니라 회전 각도까지 포함한 정밀 조작이 가능하도록 돕는다.
연구팀은 해당 데이터세트를 바탕으로 최신 인공지능 모델을 훈련시킨 뒤 실제 로봇 집기 실험을 진행했다. 그 결과 단순 환경(5개 물체 기준)에서는 기존 77.5%였던 집기 성공률이 93.4%로, 복잡한 환경(15개 물체 기준)에서는 기존 54.9%에서 67.9%로 크게 향상되는 성과를 거뒀다.
이규빈 교수는 "이번 성과는 산업 환경과 가정에서 마주치는 복잡한 상황을 최초로 충실히 재현했을 뿐 아니라, 로봇이 현실 세계에서 학습하고 행동하는 것을 목표로 하는 피지컬 AI 연구에도 중요한 기반을 제공한다"며 "향후 물류·제조·생활 서비스 등 다양한 분야에서 로봇 활용을 한 단계 도약시킬 수 있을 것"이라고 말했다.
이번 연구는 이규빈 교수가 지도하고 기계연구원 백승혁 선임연구원이 수행했다. 산업통산자원부 로봇산업핵심기술개발사업·산업기술알키미스트프로젝트사업의 지원을 받았으며 연구 결과는 국제학술지 'IEEE 로보틱스 앤 오토메이션 레터스(Robotics and Automation Letters)'에 8월20일 게재됐다.
GIST 연구팀은 내년 6월 오스트리아 빈에서 열릴 세계 최고 권위의 로봇 학술대회 'IEEE 국제 로봇 자동화 학술대회(ICRA 2026)'에서 해당 연구 내용을 공식 발표할 예정이다.
◎공감언론 뉴시스 lcw@newsis.com
Copyright © NEWSIS.COM, 무단 전재 및 재배포 금지
원본기사 보기
출처: 뉴시스(2025.09.09.)